Robot Vision
机器人视觉考试代考 Note Answer ALL questions. Each question will be marked out of 20. The paper will be marked out of 80, which will be rescaled to a mark out of 100
Note
Answer ALL questions. Each question will be marked out of 20. The paper will be marked out of 80, which will be rescaled to a mark out of 100.
Question 1
(a) Multiple Choice Each question has ONLY ONE CORRECT OPTION and is worth 3 marks. [6 marks]
(i) Which one does not affect the intrinsic parameters of a camera model?
a) Principal point coordinates
b) Image resolution
c) Focal length
d) Radial distortion
e) Exposure
(ii) In which case do you have to recalibrate the camera intrinsic parameters? 机器人视觉考试代考
a) When the background scene changes
b) When the camera is rotated to 90 degrees
c) When there are quick illumination changes
d) When changing the image resolution
e) When you are moving around with the camera
(b) Give two reasons for using lenses in cameras. [6 marks]
(c) There is a mobile robot with two cameras (both are assumed as a pinhole model and baseline between the cameras is 15 cm) whose optical axes lie on a horizontal plane and parallel. In the initial position, the disparity of a point P in space is 30 mm, and the disparity is changed to 50 mm when the robot moves 40 cm toward the point P. Calculate the focal length and show your working. [8 marks]
Question 2 机器人视觉考试代考
(a) The Phong illumination (reflection) model is an empirical model of the local illumination of points on a surface. Name three components composing the Phong model and describe each component. [6 marks]
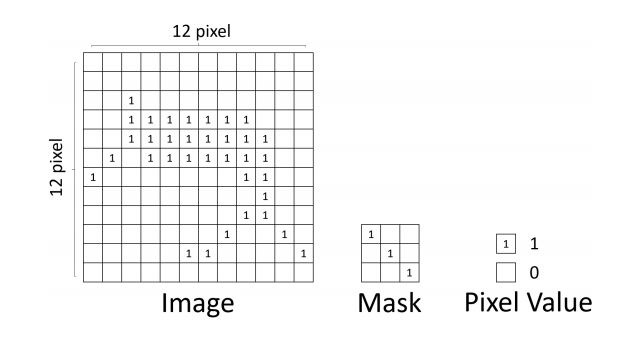
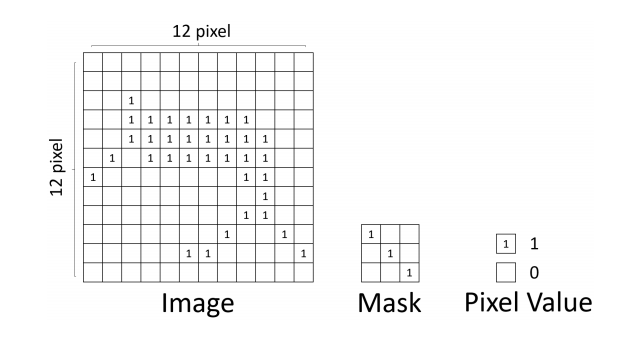
(b) Draw results of following four operations i) dilation, ii) erosion, iii) opening, and iv) closing on the given image (12 × 12 pixels) using the given mask. [6 marks]
(c) Describe the steps of the Canny edge detector. [8 marks]
Question 3 机器人视觉考试代考
(a) Describe the steps of the RANSAC algorithm. [6 marks]
(b) Describe pros and cons of K-means clustering (at least two for each pros and cons). [6 marks]
(c) Explain what makes SIFT descriptor invariant to i) scale, ii) rotation, iii) illumination, and iv) small shifts (translations), separately. [8 marks]
Question 4 机器人视觉考试代考
(a) Given that a convolutional neural network has five convolution layers (all the convolution layers are composed of 3 × 3 convolution filters with stride 1 and no pooling layers), calculate how many pixel in the input image are supporting a neuron in the fifth layer? Justify your answer. [6 marks]
(b) You are given an input image size of 65 × 65 × 3, and you are using eleven 5 × 5 × 3 convolution filters. (i) What is the total parameter number in this convolutional layer? (ii) If the stride is 3 and no padding method is used, then what is the dimension of the output after the convolutions? Show your working. [6 marks]
(c) There are two categories of method by which a robot can measure depth/distance: passive methods and active methods. List two passive methods and three active methods, and describe each method in one sentence. If you are designing a depth/distance camera for a Mars rover, which method would you choose? Justify your answer. [8 marks]

