Programming1 COSC 1073, S2, 2020
Assignment Part B: ASCIIBot Robot Implementation
编程代码代写 This specification builds upon your part A solution however it can be done without a working part A since there is no error checking or ···
Assessment Type: Individual assignment; no group work. Submit online via Canvas→Assignments→Assignment Part B. Marks are awarded for meeting requirements as closely as possible according to section 2 and the supplied rubric. Clarifications/updates may be made via announcements/relevant discussion forums.
Weighting: 40 marks (40% of your final semester grade)
1、Overview 编程代码代写
This specification builds upon your part A solution however it can be done without a working part A since there is no error checking or collision detection and the provided ASCIIBot skeleton code responds to manual keyboard control in the same way as the part A RobotImpl. Nevertheless, if necessary you should seek help in the tutelab/consultation to finish assignment part 1 since it is a core requirement of this course that you should be able to work with basic control structures. Furthermore, you will require a solid grasp of basic java programming to effectively use classes and interfaces in assignment part B!
NOTE: The supplied Robot P1 Part B/ eclipse Project is dependent on the Robot P1/ project via the build path so this project should be available and open in the workspace. You should use your own Robot P1/ solution project however the project will also work with the supplied startup project for part A. The video RobotSuppliedB.mp4 shows the execution of a correctly configured project.
2、Assessment Criteria 编程代码代写
As well as functional correctness (ASCIIBot behaviour matches video requirements) you will also be assessed based on the following code quality requirements:
- Follows the provided design in terms of class structure.
- Uses meaningful / descriptive identifiers (eg variable and method names).
- Demonstrates understanding of local variables versus class attributes and prefer local scope where possible.
- Demonstrates the use of defined constants in Control.java (Rather than using magic numbers)
- Avoids code repetition. (THIS IS THE MOST IMPORTANT ONE!)
- Well encapsulated (use of private methods where appropriate etc.)
- High Cohesion/Low Coupling
- Appropriate use of comments (but remember that easily understandable code is better than a comment!).
- Include a comment at the top of ASCIIBot.java class stating your name and student number.
The assignment will be marked based on the specific rubric provided on Canvas.
3、 Learning Outcomes 编程代码代写
This assignment addresses the following learning outcomes from the Course Guide
CLO 1: Solve simple algorithmic computing problems using basic control structures and Object-Oriented Techniques.
CLO 2: Design and implement computer programs based on analysing and modelling requirements.
CLO 3: Identify and apply basic features of an Object-Oriented programming language through the use of standard Java (Java SE) language constructs and APIs.
CLO 4: Identify and apply good programming style based on established standards, practices and coding guidelines.
CLO 5: Devise and apply strategies to test the developed software.
4、Assessment details 编程代码代写
Ok so now you are going to do your own complete Robot program! You are no longer going to use the supplied RobotImpl but are instead going to write your own implementation of the Robot interfaces called the ASCIIBot. Well ok not from scratch, since we have given you a fair bit of code to get you started 🙂
Don’t panic you don’t have to deal with real graphics for this assignment since we are going old school and are using the Lanterna terminal emulator package to allow you to do basic ASCII drawing. The Robot P1 Part B/ Eclipse project includes the lanterna-3.0.1.jar file and includes code which shows you how to initialise and draw characters at a specific x,y (col/row) co-ordinate. You do not need to, but if you are interested you can find more information about other extra functionality of Lanterna here:
http://mabe02.github.io/lanterna/apidocs/3.0/
https://mvnrepository.com/artifact/com.googlecode.lanterna/lanterna/3.0.1
NOTE: The primary specification is the supplied video “RobotSolutionB.mp4” which shows the full behaviour you should reproduce.
You have been given skeleton code that provides all of the required classes and interfaces.
The only new interface beyond assignment part A is the following Drawable interface. 编程代码代写
public interface Drawable { public abstract void draw(SwingTerminalFrame terminalFrame); }
Along with the other provided classes, this gives you a basic design where each of the components of the robot environment is able to draw itself to the terminal by implementing the draw() methods. You may also find it useful to include an extra abstract class as follows (this is how we did it and it reduces some code duplication):
public abstract class AbstractItem implements Drawable
If you do this then Bar, Block and even the Arm class can extend AbstractItem instead of implementing the Drawable interface directly.
Skeleton code for all of these classes is provided in the supplied Robot P1 Part B/ eclipse project. It also manually draws a single ‘bar’ to show you Lanterna code in action since this is the only part of the assignment that is not specified by standard Java and described in the standard Java API docs.
In addition to drawing the various components (bars, blocks and arm segments) your ASCIIBot class will need to keep track of the current position of all bars and blocks as it responds to commands from the Robot interface.
However it does NOT need to:
- Do any control of its own (this is still done by the RobotControl class) or manually using the same key bindings as assignment part A
- Do any error checking. i.e. if invalid commands are given your code will either ignore them or drop blocks in the wrong position, morph through objects etc. i.e. we will test with correct control code.
Suggestions on How to Proceed 编程代码代写
To get started you should experiment and familiarise yourself with the Lanterna setCursorPosition() and putCharacter() methods. They are straight forward i.e. move to a col (x) and row (y) position and then draw a character. An example is provided in the ASCIIBot.demoDraw() method. NOTE: Screen co-ordinates are 0,0 is top left so you need to do some translation!
Next you should implement the draw() method for the Block and Bar classes so that they can be drawn at a fixed arbitrary position (no need to worry about moving them yet). Use the colors as shown in the video and specified in the supplied Drawable interface.
Next do the same for the Arm class. This one is a bit more complicated since drawing the arm involves drawing all three segments.
In fact you can choose to have a separate class for each arm but for simplicity a single class works fine.
Once the three robot environment components (Arm, Bar, Block) are able to draw themselves, the final and most challenging piece of the puzzle is to keep track of the internal state of the arm, bars and blocks and draw them in the correct position.
i.e. first handle the init() case when the bars and block arrays are passed in and draw them at the correct starting position (you can use the supplied videos as well as the Part A RobotImpl.jar for reference). This is also the right place to initialise all of the data structures that will be used to keep track of positioning in the robot environment when you perform subsequent moves.
Finally for each movement command (up(), down(), pick() drop() etc .) keep track of the positional changes (using appropriate variables/data structures) and redraw the entire screen. 编程代码代写
You will run your ASCIIBot using the provided main() method:
public static void main(String[ ] args) { new RobotControl().control(new ASCIIBot(),null, null); }
This simply creates a new instance of the RobotControl() class from part A and executes the control method which will then call init() and execute commands on your ASCIIBot.
NOTE: There is no special trick to the animation/movement. But rather every time a robot movement command is issued, you redraw everything at the updated co-ordinates. If you are clever you can do this polymorphically with draw()!
The final requirement is to draw the numbering for the three Arm segments and the bars and blocks. Note that since only a single digit is shown, the value of ‘+’ is drawn for any value > 9 for any given arm segment.
IMPORTANT: As with Part A do not change any of the provided interfaces such as Control, Robot or RobotMovement since we will rely on these for testing using our own RobotControl implementation. Additionally Part B is compatible with your Part A RobotControl implementation.
Summary 编程代码代写
Write Object-Oriented code using classes, interfaces, loops, conditionals and methods to reproduce the behaviour shown in the video RobotSolutionB.mp4 and elaborated above. NOTE: All of the robot colors, sizes etc. follow part A for consistency. To obtain full marks you must implement the provided methods in the provided classes. If these are unused then you are doing something wrong so please seek help!
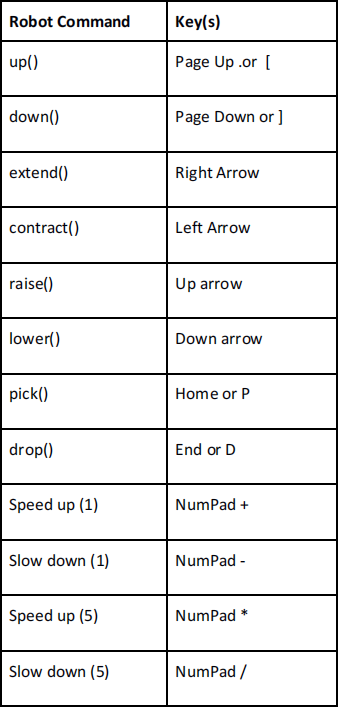
Manual Robot Control (Testing Only No Marks)
For testing purposes you can control the robot arm manually using the following keys. This will help you determine when collisions occur etc. before or while writing control code.
5、Referencing and third party code exclusion
- You are free to refer to textbooks and notes, and discuss the design issues (and associated general solutions) with your fellow students or on Canvas; however, the assignment should be your OWN INDIVIDUAL WORK and is NOT a group assignment.
- You may also use other references, but since you will only be assessed on your own work you should NOT use any third-party packages or code (i.e. not written by you) in your work.
- You must use primitives and Arrays for your data structures and should not use any of the Java Collection Framework classes such as Collections/Lists/Maps etc. since your application of OO principles is being tested through the the implementation of the provided classes (Arm, Bar, Block etc.).
6、Submission format 编程代码代写
The source code for this assignment (i.e. complete compiled Eclipse project¹ ) should be submitted as a .zip file by the due date. You can use the Eclipse option export->general->archive.
You can include a README.TXT file in the root of the project providing any details about your project and running your submission although this should not be necessary if you have adhered to this specification!
1 You can develop your system using any IDE but will have to create an Eclipse project using your source code files for submission purposes.
IMPORTANT: SUBMISSIONS OF ANY OTHER ROBOT PROJECT OR CODE WHICH DOES NOT ADHERE TO THIS SPECIFICATION AND PROVIDED CODE WILL RECEIVE A ZERO MARK
¹ You can develop your system using any IDE but will have to create an Eclipse project using your source code files for submission purposes.
7.Academic integrity and plagiarism (standard RMIT warning) 编程代码代写
NOTE: Any discussion of referencing below in the standard RMIT policy is generic and superseded by the third-party code exclusion in section 5.
Your code will be automatically checked for similarity against other students’ submission so please make sure your submitted assignment is entirely your own work.
Academic integrity is about honest presentation of your academic work. It means acknowledging the work of others while developing your own insights, knowledge and ideas. You should take extreme care that you have:
- Acknowledged words, data, diagrams, models, frameworks and/or ideas of others you have quoted (i.e. directly copied), summarised, paraphrased, discussed or mentioned in your assessment through the appropriate referencing methods,
- Provided a reference list of the publication details so your reader can locate the source if necessary. This includes material taken from Internet sites.
If you do not acknowledge the sources of your material, you may be accused of plagiarism because you have passed off the work and ideas of another person without appropriate referencing, as if they were your own.
RMIT University treats plagiarism as a very serious offence constituting misconduct. Plagiarism covers a variety of inappropriate behaviours, including:
- Failure to properly document a source
- Copyright material from the internet or databases
- Collusion between students
For further information on our policies and procedures, please refer to the University website.
8、Assessment declaration
When you submit work electronically, you agree to the assessment declaration.

更多代写:编程作业代做 Online exma代写 英国代上网课 艺术论文代写 学术性英文paper代写 网课隐藏优势代写
